
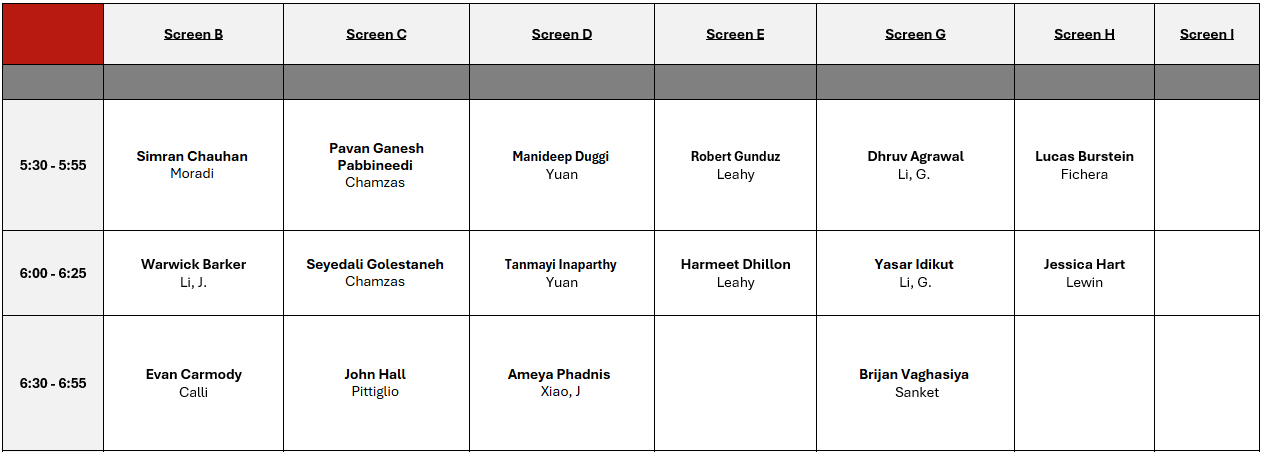
Robotics Engineering Spring 2026 Graduate Capstone Schedule
5:30 PM - 6:00 PM
SIMRAN CHAUHAN
Title: Real-Time Direction-Aware Traversability Estimation with Physics Supervision for Off-Road Autonomous Vehicles
Abstract: Off-road autonomous vehicles require accurate, real-time assessment of terrain traversability that accounts for terrain topography, and vehicle geometry and orientation. However, performing this assessment through conventional physics-based mobility analysis is computationally prohibitive for real-time use. This work presents a learning-based approach by incorporating a novel criteria for topographical mobility evaluation and thus provides a fast alternative to computationally expensive physics-based mobility analysis. The proposed method is trained using supervision from a deterministic mobility engine and is designed to identify safety-critical impassable regions under significant class imbalance. By incorporating terrain-geometry information during learning, the approach captures richer mobility cues than binary passability labels alone. The framework is evaluated on synthetic off-road terrains of varying difficulty and demonstrated on simulated LiDAR-derived terrain maps from simulation. Results show improved detection of impassable terrain and produce aggregated traversability scores that can be directly used for downstream path planning, supporting real-time mobility assessment for autonomous ground vehicles in unstructured environments.
Advisor: Lee Moradi
PAVAN GANESH PABBINEEDI
Title: On the Advantages of Control-Space Kinodynamic Planning and Control Over Geometric State-Space Methods for Ground Vehicle Navigation
Abstract: Autonomous ground vehicles need motion planning and control methods that consider the vehicle's dynamic limitations. Traditional approaches first plan a path in the geometric state space using only position and heading, and then use a controller to follow that path based mainly on positional error. Because these methods ignore velocity and dynamic feasibility during planning, the controller must make reactive corrections to follow trajectories that may not be dynamically achievable, leading to larger tracking errors and less smooth motion.
To address this, this project implements a motion planning and control framework that operates directly in the control space. It generates time-parameterized references that are dynamically feasible by construction. The controller consumes this full kinodynamic reference, enabling predictive control that accounts for vehicle kinodynamics, rather than tracking geometric waypoints alone.
The framework is tested on two platforms with different dynamics: an Ackermann-steered vehicle in simulation and a differential-drive robot in a real indoor environment. The proposed approach is compared with a traditional geometric state-space method using the same controller and optimizer. Results show a significant reduction in cross-track error, with the kinodynamic control-space approach achieving lower tracking error while also producing smoother motion. These results demonstrate the benefits of integrating planning and control directly in the control space for autonomous vehicle navigation.
Advisor: Constantinos Chamzas
MANIDEEP DUGGI
Title: A Preference-Aware, Socially Aware Multi-Robot Assistive System
Abstract: This project presents a socially and physically assistive multi-robot system that integrates a social robot, Pepper, with a mobile manipulation robot, Stretch, to support object-fetch and delivery tasks during daily activities. In this system, Stretch provides physical assistance through autonomous navigation, object retrieval, and delivery, while Pepper serves as the primary user-facing robot, providing spoken interaction, social engagement, task explanations, confirmation prompts, and progress updates. To make the interaction more personalized and user-centered, the project investigates individual differences in preferences for robot communication and assistance style. Based on user responses to a structured preference questionnaire, the system defines multiple interaction profiles that vary along dimensions such as verbal presence, update frequency, initiative, consent, social tone, explanation detail, support, and anthropomorphic style. These profiles are implemented as distinct robot characters that allow Pepper to tailor its behavior to different user preferences. Overall, the project demonstrates how a coordinated multi-robot assistive system can combine physical task support with personalized social interaction to improve user comfort, engagement, transparency, and acceptance during everyday assistive tasks, with the potential to promote long-term user adoption of assistive robots.
Advisor: Fiona Yuan
ROBERT GUNDUZ
Title: Reinforcement Learning for Frontier Exploration
Abstract: Exploring new reinforcement learning methodology for tasking a robot to map an unknown environment as quickly as possible. Implementation includes, but is not limited to, tuning hyper-parameters for an existing Advantage Actor Critic (A2C) model, or investigating other approaches such as sequence to sequence (Sec2Sec).
Advisor: Kevin Leahy
DHRUV AGRAWAL
Title: EAGLE: Efficient Aerial Guidance for Interconnected Load Systems
Abstract: This work presents a control framework for cooperative aerial payload manipulation using single and multiple quadrotors transporting a cable-suspended load. The system considers both a quadrotor-centric formulation, where UAVs independently track trajectories while treating the payload as a disturbance, and a payload-centric formulation, where the coupled dynamics of the quadrotor–payload system are explicitly modeled for direct payload trajectory control. A geometric controller is employed to ensure stable and precise flight, while a multi-quadrotor extension enables cooperative transport of a rigid body payload through taut cable connections. The proposed framework enables coordinated aerial manipulation by leveraging system-level dynamics to achieve stable and accurate payload trajectory tracking under coupling constraints.
Advisor: Guanrui Li
LUCAS BURSTEIN
Title: Robotically Controlled Magnetic Laser Aiming for Surgical Applications
Abstract: This project presents a novel optical fiber steering system for laser surgery based on magnetic actuation. Fiber steering is achieved by means of two permanent magnets: a small magnet mounted at the distal end of the fiber and a larger, robotically manipulated magnet that generates controlled magnetic torque and force. In clinical use, the larger magnet would remain outside the patient’s body, positioned close enough to produce the necessary magnetic fields. Open-loop laser aiming of the proposed system was demonstrated.
Advisor: Loris Fichera
6:00 PM - 6:30 PM
WARWICK BARKER
Title: Facilitating Industrial Changeover Through A Sketch-Based Interface
Abstract: Industrial changeover is a wasteful process that continues to hinder automation efforts in high mix, low volume (HMLV) manufacturing environments. Without a way to mitigate changeover waste, it is difficult to economically justify new automation projects in HMLV industries. This project aims to reduce wasteful changeover time for industrial robot applications through the use of a sketch-based interface and robot-mounted camera. With little-to-no training, an operator can set up a new job using simple sketching tools to draw on an image of the new part. This process further abstracts programming from changeover operations to the point that an operator needs zero understanding of conventional teach pendant programming methods to successfully complete a changeover operation. By simplifying changeover and reducing waste, manufacturers can justify and implement increased automation in one of the most automation-averse manufacturing segments.
Advisor: Jane Li
SEYEDALI GOLESTANEH
Title: AURA: Asymptotically Optimal Uncertainty-Robust Replanning Algorithm for Kinodynamic Planning
Abstract: Sampling-based motion planners offer a practical and scalable approach to kinodynamic motion planning, notably for high-dimensional, underactuated, or non-holonomic systems, where analytic trajectory generation and exhaustive search over the state space are infeasible. However, their sequential computation leads to slow convergence toward optimal solutions. Moreover, the offline planning process cannot be coupled with execution steps to take into account of the motion uncertainty. In this work, both limitations are addressed within a unified framework, AURA, an asymptotically optimal meta-planner, robust to uncertainties that arise during execution. Alongside the main execution thread, this framework consists of a replanning module, which continuously explores the state space and improves the plan during execution, and an optimization module, which refines control inputs to reduce tracking error. The proposed approach is evaluated in both simulation and real-world environments across a variety of systems, demonstrating consistent improvements in path efficiency in comparison to other baselines.
Advisor: Constantinos Chamzas
TANMAYI INAPARTHY
Title: Beyond Physical Safety: Vision-Language Models for Emotional Safety Reasoning in Dementia Care
Abstract: SafeScore is a framework that fine-tunes vision-language models to reason about emotional safety in dementia care interactions. Rather than focusing solely on physical hazards, SafeScore analyzes care videos to interpret the emotional states of people living with dementia (PLWDs) — processing facial expressions, body language, gestures, and speech together — and generates structured safety scores that quantify whether a caregiver's actions are helping or unintentionally escalating distress. The system builds a multimodal training pipeline using dementia care videos, NVILA-8B-generated captions, Whisper transcripts, and DeepSeek-R1-generated Question–Reasoning–Answer supervision to fine-tune long-context VLMs for emotional reasoning. In addition to the large-model pipeline, We also aim to develop a lightweight SafeScore using Moondream2, a lightweight VLM, enabling emotional safety scoring to run efficiently on small, resource-constrained devices — making the framework deployable in real-world assistive robots, smart-home systems, and telehealth platforms where computational resources may be limited.
Advisor: Fiona Yuan
HARMEET DHILLON
Title: Real Time optical Communication using event cameras
Abstract: In multi-robot systems, traditional radio frequency (RF) communication struggles with contention and jamming. Optical communication offers a strong alternative. However, conventional frame-based cameras suffer from limited frame rates, motion blur, and reduced robustness under high dynamic range lighting. Event cameras support microsecond temporal resolution and high dynamic range, making them extremely sensitive to scene changes under fast relative motion with an optical transmitter. Leveraging these strengths, we develop a complete optical communication system capable of tracking moving transmitters and decoding messages in real time. Our system achieves over 95% decoding accuracy for text transmission during motion by implementing a Geometry Aware Unscented Kalman Filter (GA-UKF), achieving 7× faster processing speed compared to the previous state of-the-art method, while maintaining equivalent tracking accuracy at transmitting frequencies ≥ 1 kHz.
Advisor: Kevin Leahy
YASAR IDIKUT
Title: Safety-Critical Quadrotor Navigation Using Fourth-Order Control Barrier Functions with Full Nonlinear Quadrotor Dynamics
Abstract: Safety-critical quadrotor navigation in cluttered environments typically relies on hierarchical architectures in which a high-level safety filter modifies position references that are then tracked by a separate attitude controller. However, This separation can create a mismatch between translational safety objectives and attitude evolution. To address this gap, we propose a safety controller based on high order control barrier functions that explicitly incorporates the full nonlinear quadrotor dynamics, including attitude dynamics and torque-level actuation. Moreover, we propose 2 control designs to leverage the nonlinear model predictive control and the proposed high-order control barrier function for the tasks of quadrotor obstacle avoidance. The resulting formulation enforces obstacle-avoidance constraints while optimizing control torques, granting the safety layer direct authority over attitude behavior and eliminating the hierarchical disconnect inherent to reference-tracking safety filters. We validate the approaches in both high-fidelity simulation and real-world flight experiments, demonstrating reliable constraint satisfaction and successful obstacle avoidance. These results suggest that torque-level high-order CBFs provide a practical pathway to provably safer quadrotor navigation under full-body dynamics.
Advisor: Guanrui Li
JESSICA HART
Title: SWAMP Docking Station Design
Abstract: The System for Watering and Autonomously Monitoring Plants (SWAMP) is a mobile robot designed to care for plants with minimal user input. During its development by last year's MQP team, the robot successfully demonstrated navigation, obstacle avoidance, and precision watering. However, its autonomy was limited by the need for manual water refilling and battery monitoring. This capstone addresses those limitations through the design and development of a docking station for SWAMP. The docking station will serve as a home base and autonomously refill the robot's onboard water tanks. The addition of a docking station will reduce required user maintenance and enable SWAMP to care for plants over extended periods without human intervention.
Advisor: Greg Lewin
6:30 PM - 7:00 PM
EVAN CARMODY
Title: Gripper Design for Soft Continuum Robots
Abstract: Designing and fabricating a lightweight, effective gripper design for implementation with a cable-driven origami module soft continuum robot arm. The gripper will contain a camera for vision based servoing and must integrate well with control and actuation pipeline. Testing and integration with the entire system will follow to evaluate designs for efficiency and compatibility.
Advisor: Berk Calli
JOHN HALL
Title: Structured Light for Endoscopic Depth Estimation
Abstract: Current gastric endoscopy vision capabilities are limited by the use of monocular cameras. Estimating the volume of the stomach is a crucial component for successful Endoscopic Sleeve Gastroplasty (ESG) operations and is currently done by surgeon intuition. Traditional vision based depth estimations such as stereo or time of flight struggle in the poorly lit and reflective environment of the stomach. The solution proposed by this project is depth estimation using structured light with a monocular camera and diffracted laser system. The system generates a sparse but robust point cloud which can be used to estimate the volume of the stomach. This project outlines a method to calibrate and camera/laser pair and estimate the depth. The system was tested on a variety of surface shapes and materials in addition to ex-vivo stomach tissue.
Advisor: Giovanni Pittiglio
AMEYA PHADNIS
Title: An Improved Manipulation Framework for Object Grasping using Point Clouds
Abstract: This Capstone Project proposes a consolidated vision-guided grasping pipeline that leverages a novel octree-based vision algorithm applied to point clouds that is designed to provide a compact yet geometrically informative description of the scene. Building on this representation, a new algorithmic grasping method is developed that directly operates on the octree structure, enabling efficient reasoning over object geometry and spatial occupancy without reliance on learning-based models. The proposed framework is tested in Gazebo on several objects from the YCB dataset, and the success rate and grasp pose accuracy for the objects are noted. It is observed that with the help of the vision output, a simple approach is required to perform grasping of objects, which would otherwise require heavy computation or learning-based methods to achieve similar results.
Advisor: Jing Xiao
BRIJAN VAGHASIYA
Title: Navigation in Complete Darkness using Neuromorphic Cameras
Abstract: This research presents a method for autonomous navigation in zero-light environments using Neuromorphic camera, structured lighting and coded apertures. By projecting structured light patterns and capturing the reflected images through a coded aperture, the system enhances depth estimation in complete darkness. A deep learning framework processes these images to extract depth information, enabling navigation in challenging, low-visibility environments.
Advisor: Nitin Sanket