Get to know how our students’ MQP experience has direct ties to their success.
Project Title:
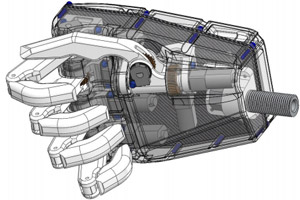
Design of a Human Hand Prosthesis
Project Author:
Paul Ventimiglia, Liberal Arts & Engineering
 Project Description:
Project Description:
Paul Ventimiglia’s fascination with robotics found its beginnings in movies like Star Wars and The Terminator. Designing and building a human robotic arm was always a dream of his–-one that was realized at WPI. His MQP served as an exploration in researching the current state of prosthetic arms and hands, and ultimately the platform for designing a prosthetic hand. Its design is meant to bridge the gap somewhere between simple prosthetic hooks and expensive, uncommonly used robotic prosthetic hands.
Addressing the current challenges in functionality and cost, Paul Ventimiglia created the design for an affordable anthropomorphic prosthetic hand. This novel design incorporates five individually actuated fingers in addition to powered thumb roll articulation, which is unseen in commercial products. Fingertip grip force is displayed via LEDs for feedback control. The hand contains a battery and microcontroller. Multiple options for signal input and control algorithms are presented. A prototype will serve as a platform for future programming efforts. Read More (PDF) on Ventimiglia's MQP.
Project Title:
ORYX 2.0: A Planetary Exploration Mobility Platform
Project Authors:
- Joseph Lawrence Amato, Robotics Engineering
- Jon Jacob Anderson, Robotics Engineering/Mechanical Engineering
- Thomas James Carlone, Robotics Engineering
- Michael Eli Fagan, Liberal Arts & Engineering
Project Description:
The high costs and dangers associated with space exploration have led NASA and other private enterprises to pursue planetary research through the use of unmanned robotic systems. Continued interest in lunar, Martian, and deep-space exploration has created a demand for many surface rovers, for a variety of research purposes. WPI students made it their mission to design, develop, and test a rover to serve as a research platform, suitable for testing planetary surface exploration technologies in harsh earth environments.
This project involved the design, manufacturing, integration, and testing of ORYX 2.0, a modular mobility platform. ORYX 2.0 is a rover designed for operation on rough terrain to facilitate space-related technology research and Earth exploration missions. Currently, there are no low-cost rovers available to academia or industry, making it difficult to conduct research related to surface exploration. ORYX 2.0 fills this gap by serving as a ruggedized, highly mobile research platform with many features aimed at simplifying payload integration. Multiple teleoperated field testing trials on a variety of terrains validated the rover’s ruggedness and ability to operate soundly. Lastly, a sample payload in the form of a deployable camera boom was designed, built, and tested in order to demonstrate the effectiveness of payload integration features.
Their design successfully incorporated the features essential for most planetary exploration missions, including mobility and basic navigation, teleoperation and intuitive user controls, and low mass and small form-factor. Read more (PDF) on the MQP.