


Robot dynamics; System modeling; Dynamical control; Kinematics; Dynamic simulation;


Control theory; Feedback control; Adaptive control; Applications on mobile robots and manipulators;

Multi-robot systems; Distributed control; Task assignment; Heterogeneous systems;


Self-organization; Collective intelligence; Game theory; Swarm robotics;


RBE: 520 Biomechanics and Robotics
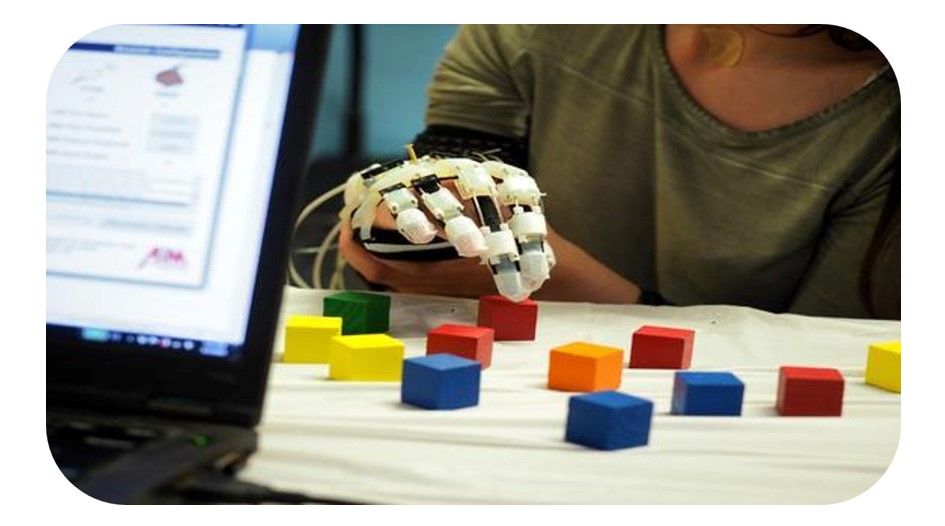
Biological and Artificial sensors, actuators and control, Orthotics Biomechanics and Robotics, Prosthetic Biomechanics and Robotics




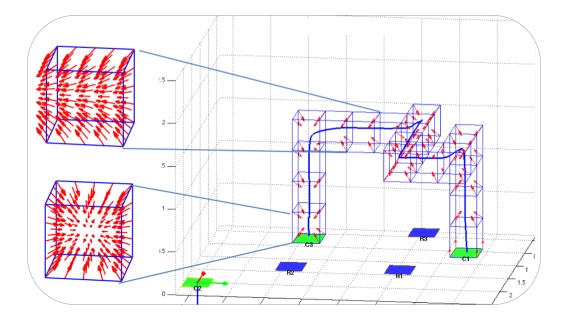
Continuum robotics; Flexible robotic arms; Minimally invasive surgery; Robot design and control;

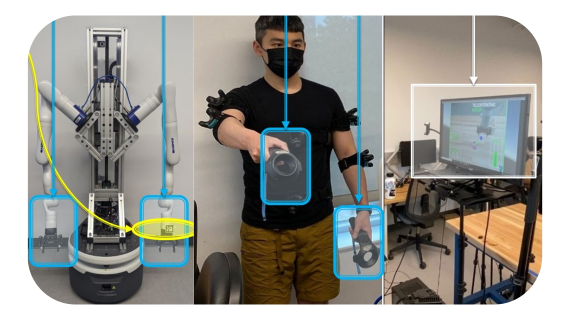
RBE/CS 526: Human-Robot Interaction
Human-Robot Interaction; Social Robot Learning; Real-World Environments; Long-Term Interaction;

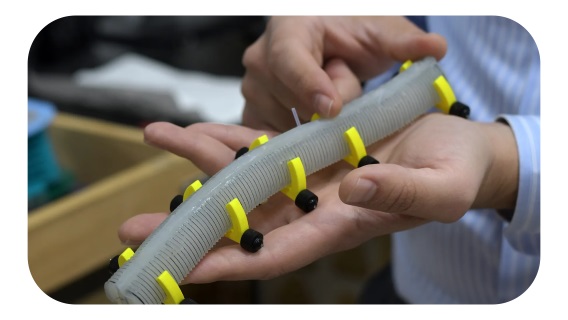
Soft robotics; Elastic actuation; Embedded Intelligence; Soft robot modelling;


RBE 533: Smart Materials & Actuation
Smart materials; Electroactive polymers; Shape memory alloys; Ion-polymer metal composites; Biomimicry;

Fluidically-driven robotic systems; Fused deposition modeling; Advanced multi-material printing techniques; Impermeable material systems; Fluidic actuators.

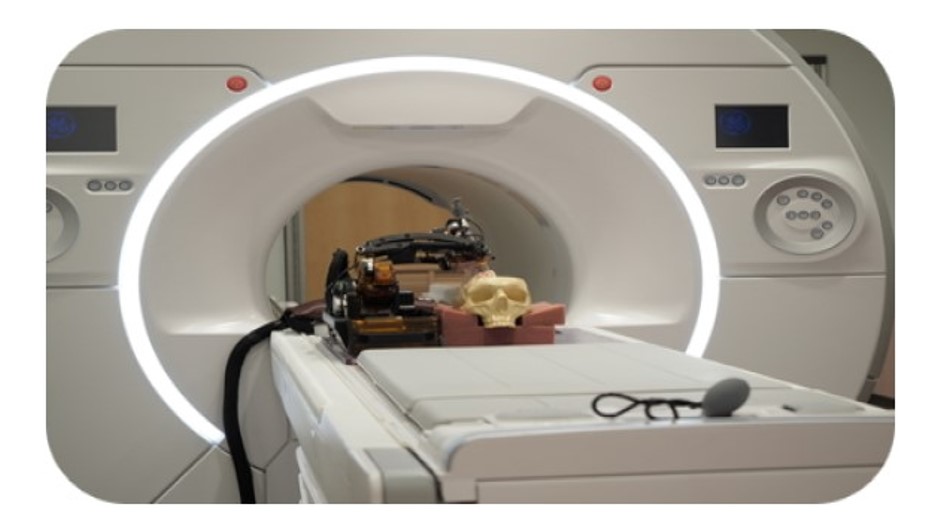
RBE 544: Imaging for Medical Robotics
Radiography; X-ray computed tomography; Nuclear medicine; Ultrasound imaging; Magnetic resonance imaging.

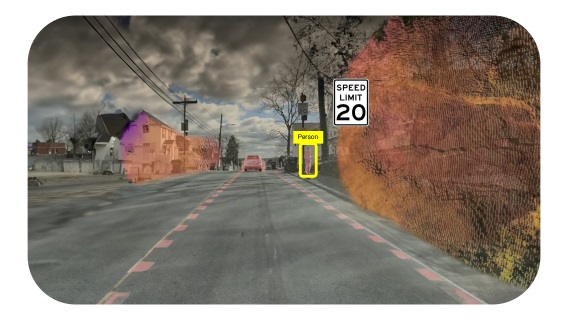
RBE/CS 549: Computer Vision
Computer Vision; Deep Learning; Sensor Fusion; 3D Reconstruction; 3D from Motion;

Motion planning algorithms; Robot manipulation; Path planning; Multi-robot planning; Manifold planning;

RBE 575: Safety and Guarantees for Autonomous Robots
Formal methods; Safe reinforcement learning; Planning and reasoning; Safe control; Symbolic control;


RBE 577: Machine Learning for Robotics
Behavioral cloning; State prediction; Actor-critic; Visual foresight; World model construction.


Medical imaging, Coordinate systems and representations in 3D space, Robot kinematics and control,

RBE 593: Directed Research for Capstone Experience
Engineering; Integration; Project-based learning; Practical application;


RBE 594: Capstone Project Experience in Robotics Engineering
Engineering; Integration; Project-based learning; Team collaboration; Practical application;


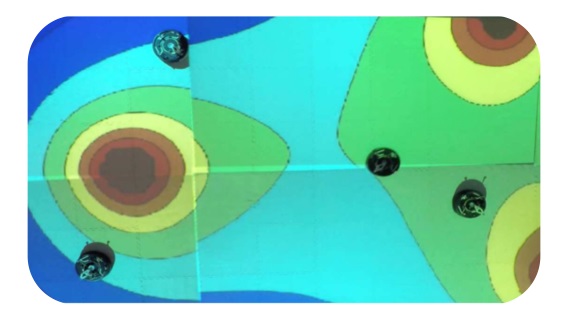
RBE 595: Special Topics Course. Optimal Control
Linear Quadratic Regulator; Model Predictive Control; trajectory planning;

RBE 595: Special Topics Course. Deep Learning for Perception
Sim2real; Adversarial attacks on neural networks; Vision transformers, Diffusion models;


RBE 595: Special Topics Course. Social AI and Robotics
Human-centered AI; Social AI, Emotional AI; AI personalization techniques



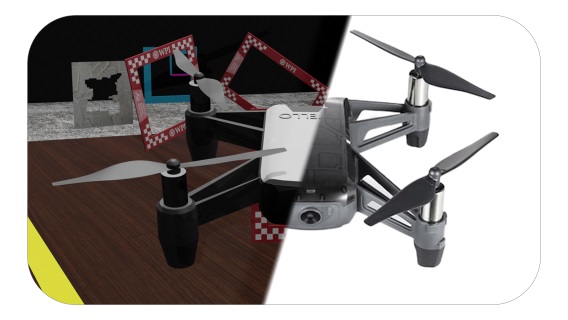
RBE 595: Special Topics Course. Hands - On Autonomous Aerial Robotics
Aerial Robotics; Hands-On; Deep Learning; Sensor Fusion; Advanced Autonomy;

Introduction to a variety of systems used to implement AVs


RBE 595: Special Topics Course. Reinforcement Learning
Markov Decision Process; model based, model based free RL, On-policy and off-policy learning


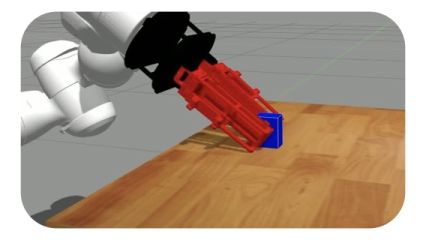
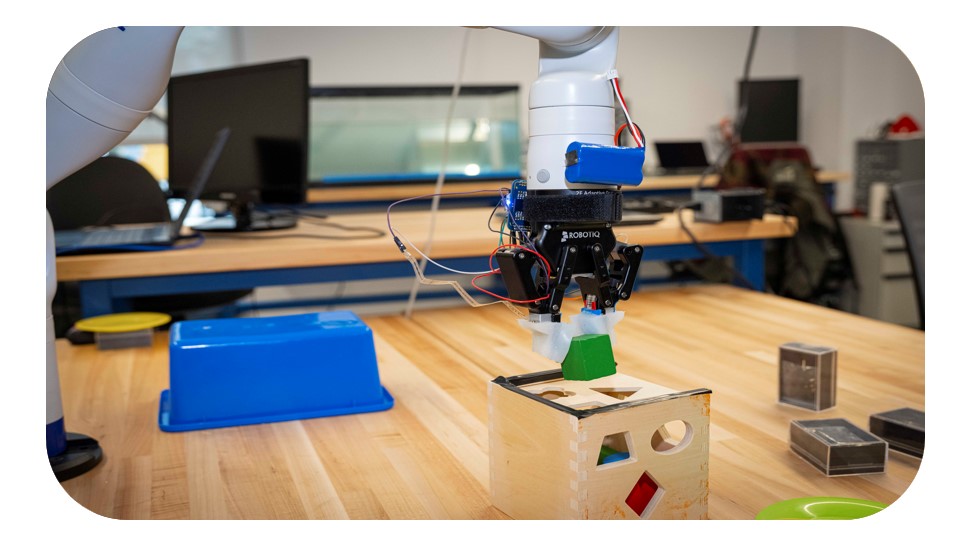
RBE 595: Special Topics Course. Vision-based Robotic Manipulation
Mathematical grasp formulations; Taxonomies; 2D and 3D Vision-based control algorithms;


RBE 596: Robotics Engineering Practicum
Robotics engineering; Real-world applications; Experiential learning; Industry experience;




RBE 699: Dissertation Research
Doctoral Studies; Research Methodology; Scholarly Inquiry; Independent Research; Pushing Boundaries;