A team of researchers at Worcester Polytechnic Institute (WPI) has received a three-year, $400,000 award from the National Science Foundation to create autonomous snake-like robots that can navigate more naturally and easily through the rubble, confined spaces, and rough terrain left in the aftermath of a disaster and send images and information to search-and-rescue teams.
“The goal of this project is to have a snake-like robot with the autonomy to navigate through its environment without close supervision,” said Jie Fu, assistant professor of electrical and computer engineering and the co-principal investigator on the project. “In search-and-rescue scenarios, you’d want a robot you can rely on to go into areas inaccessible by humans and provide critical information about conditions there and about who needs to be rescued first.”
Cagdas Onal, assistant professor of mechanical engineering and Fu’s co-principal investigator on the project, said there are three prongs to the research: mobility, low-level motion-control algorithms based on embedded sensory feedback, and high-level planning algorithms.
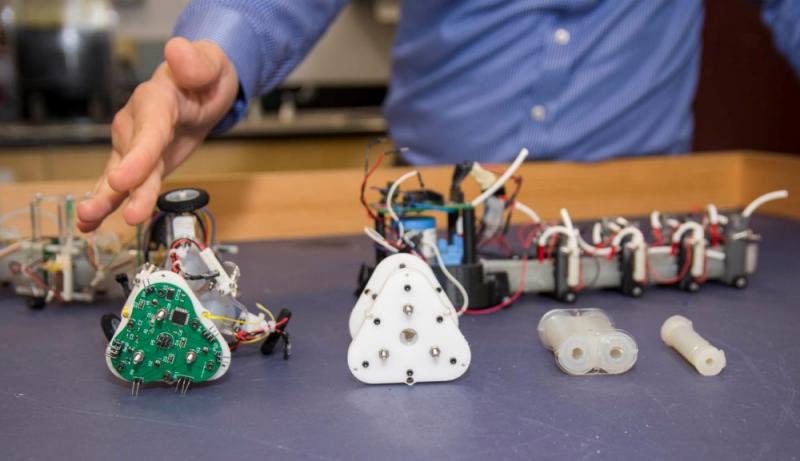
WPI scientists are pushing ahead in all three areas to create “soft” robots, constructed from silicone rubber, that are made up of connected modules, each with its own tubing, valves, pneumatic actuators, integrated sensing, and control units. Each module, or segment, of this soft robotic body is able to generate its own motion. The snake robot’s locomotion “gaits” are the combination of these local module motions.